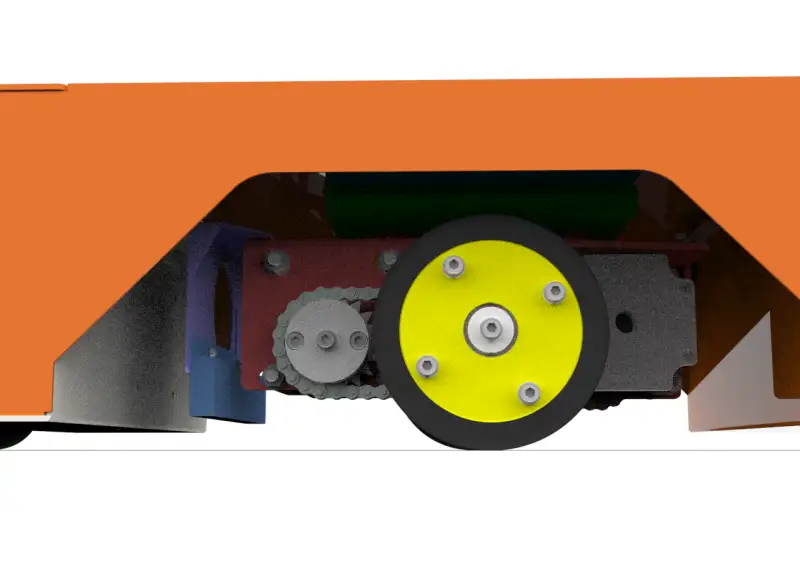
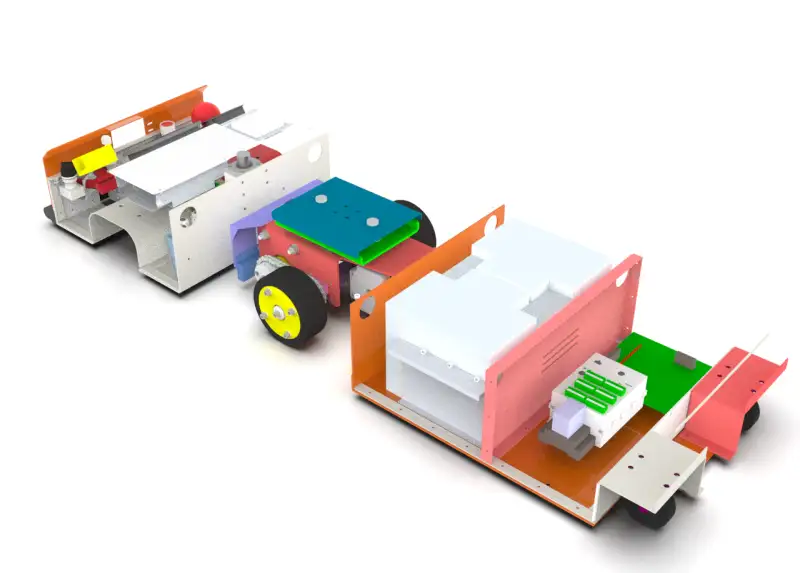
3D detailed design of AGV (automatically guided vehicle)
The ultra-low type latent AGV is lower, which can easily sneak into and tow all kinds of material vehicles; The car is easy to operate and maintain, stable driving, has been widely used in the factory workshop goods handling.
Ultra-low type latent traction AGV parameter specifications
| Body model | Ultra-low latency |
| physical dimension | L1350*W385 (mm) |
| Way to control | PLC programmable controller |
| Navigation method | Magnetic stripe guide |
| Travel direction | Go forward, turn left and right, branch |
| Communication function | Wireless communication (optional) |
| Drive method | Differential drive |
| Drive power | DC24V |
| Drive lift mode | Manual lift/electric lift |
| Load capacity | 100, 300, 500, 1000KG (customizable) |
| Travel speed | 0-45m/min speed (or customized) |
| Turning radius | The minimum can reach 300mm (route laying radius) |
| Navigation accuracy | ± 10mm |
| Way of working | 24 hours |
| Gradeability | 3-5 degrees |
| Stop accuracy | ± 10mm |
| Charging method | Manual charging (optional automatic charging) |
| Accumulator | Maintenance-free rechargeable battery, continuous discharge times>500 times |
| Safety sensing range | ± 3m, adjustable, emergency braking distance is less than 20mm |
| Human-computer interaction | The use of touch screen human-computer interaction is convenient for parameter setting, site setting and alarm display. |
| Use environment | Indoor temperature: 0~40 degrees, relative humidity: 40%~80% |
| Security | Laser obstacle detection sensor + mechanical anti-collision mechanism double protection |
| Design life | >10 years |
The 3Dmodel is drawn by SolidWorks2017, File totally 42 MB, including stp files.
")